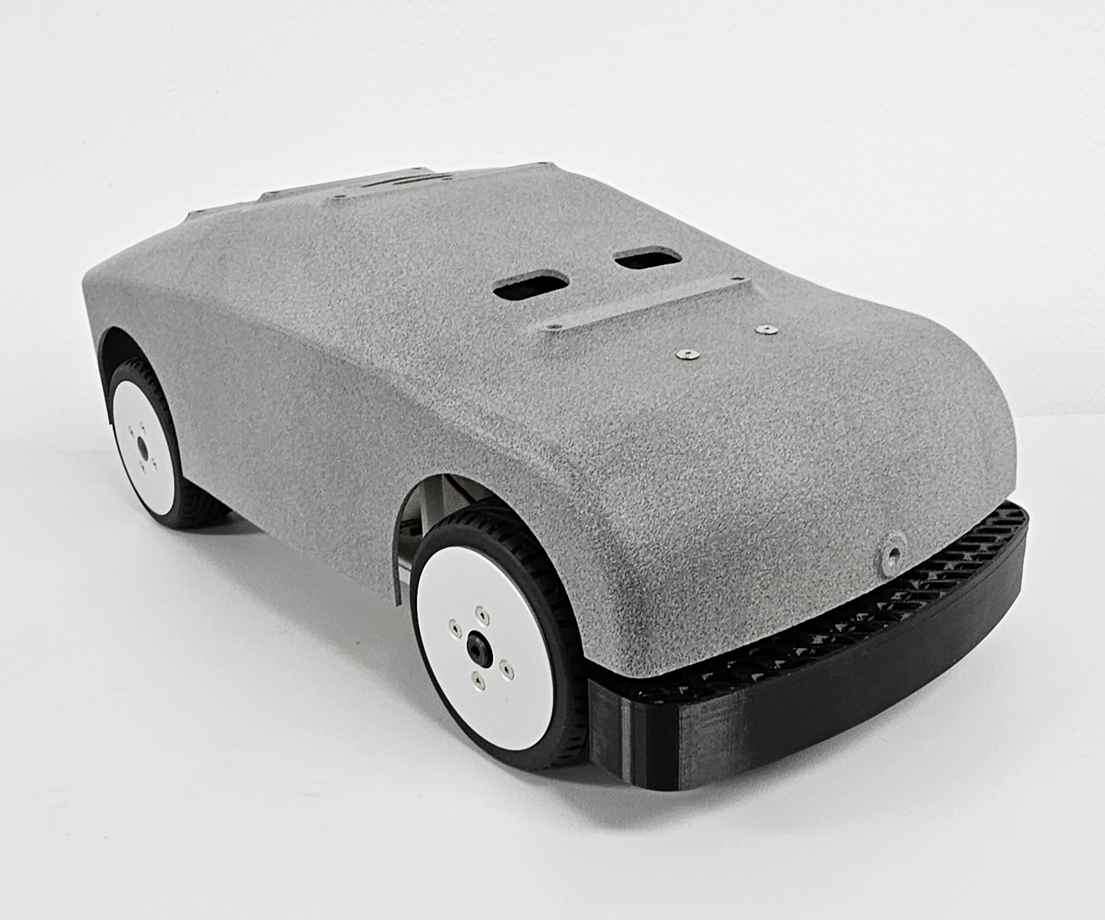
Platform Overview#
What you’ll do
플랫폼 하드웨어 구성과 역할을 파악합니다.
주행 제어의 핵심 변수인 목표 속도 \(v\)와 목표 각속도 \(\omega\) 관계를 이해합니다.
Prerequisites
Next
이 문서는 자율주행 플랫폼의 하드웨어 구성과 제어 인터페이스의 개요를 다룹니다.
사용자의 알고리즘(인지/판단/제어)은 NVIDIA Jetson Orin NX에서 실행되며, 차량 구동계(모터/서보)를 담당하는 전용 제어 보드와 USB Serial(UART) 로 통신합니다.
호스트(Jetson)는 목표 속도 \(v\)와 목표 각속도 \(\omega\)를 연산하여 전송하고, 제어 보드는 이를 실제 구동 신호(PWM)로 변환합니다.
상세한 통신 패킷 구조는 UART Protocol Reference를 참고하십시오.
주요 구성품#
플랫폼은 크게 상위 컴퓨팅 유닛과 하부 제어 구동계로 나뉩니다.
메인 컴퓨터 (Host): NVIDIA Jetson Orin NX 16GB Module
고성능 AI 연산 및 자율주행 알고리즘 실행
제어 회로 : 플랫폼 전용 Low-Level 제어 보드
센서 데이터 처리 및 액추에이터 PID 제어
조향 액추에이터: HS-5055MG (디지털 서보모터)
Ackermann 조향 구조 제어
구동 액추에이터: GM3506 BLDC 모터 (2개)
후륜 구동(RWD), 정밀 속도 제어
차량 구조 및 특징#
항목 |
세부 사양 |
비고 |
|---|---|---|
메인 컴퓨터 |
NVIDIA Jetson Orin NX (16GB) |
Team Code 실행 (인지/계획/제어) |
구동 방식 |
후륜 구동 |
짐벌 모터 2개 기반 구동 |
조향 방식 |
Ackermann Steering |
|
조향 서보 |
HS-5055MG |
기구적 조향각: \(\pm 45^\circ\) (\(\approx 0.785\,\mathrm{rad}\)), 펌웨어 제한 없음 |
구동 모터 |
GM3506 BLDC (2개) |
\(12\,\mathrm{V}\), Load torque: \(600\sim1000\,\mathrm{g\cdot cm}\) |
전원 시스템 |
4S Li-ion, \(4{,}900\,\mathrm{mAh}\) |
Jetson 및 제어 보드 통합 전원 |
차량 무게 |
약 \(2400\,\mathrm{g}\) |
배터리 포함 무게 |
차량 최대 속도 |
\(5\,\mathrm{m/s}\) |
펌웨어 제한: \(2\,\mathrm{m/s}\) (안전 고려) |
조향 제어주기 |
\(1000\,\mathrm{Hz}\) |
차량 내부 제어 주기 |
UART 연결 및 권장 설정#
Jetson과 제어보드는 USB 케이블로 연결되며, 운영체제에서는 시리얼 포트(USB Serial)로 인식됩니다.
항목 |
값 |
비고 |
|---|---|---|
포트(권장) |
|
Ubuntu에서 udev symlink 고정 권장 |
USB-UART 브리지(예시) |
FTDI FT232H (VID:PID |
|
플로우컨트롤 |
RTS/CTS |
필수 사용 |
baud rate |
\(9{,}600\, - 2{,}250{,}500\mathrm{bps}\) |
권장 : \(921{,}600\mathrm{bps}\) |
포트 고정/권한 설정: Linux Port Setup
GUI로 연결/송수신 확인: Dashboard Test
바이트 레벨 규격: UART Protocol Reference
문제 해결: UART Troubleshooting
차량 제어 메커니즘 (Vehicle Control)#
조향 및 구동 원리#
Ackermann Steering은 저속 선회에서 불필요한 미끄럼을 줄이기 위해, 안쪽/바깥쪽 바퀴의 조향각이 달라지도록 설계된 구조입니다.
제어 변수 및 물리 관계식#
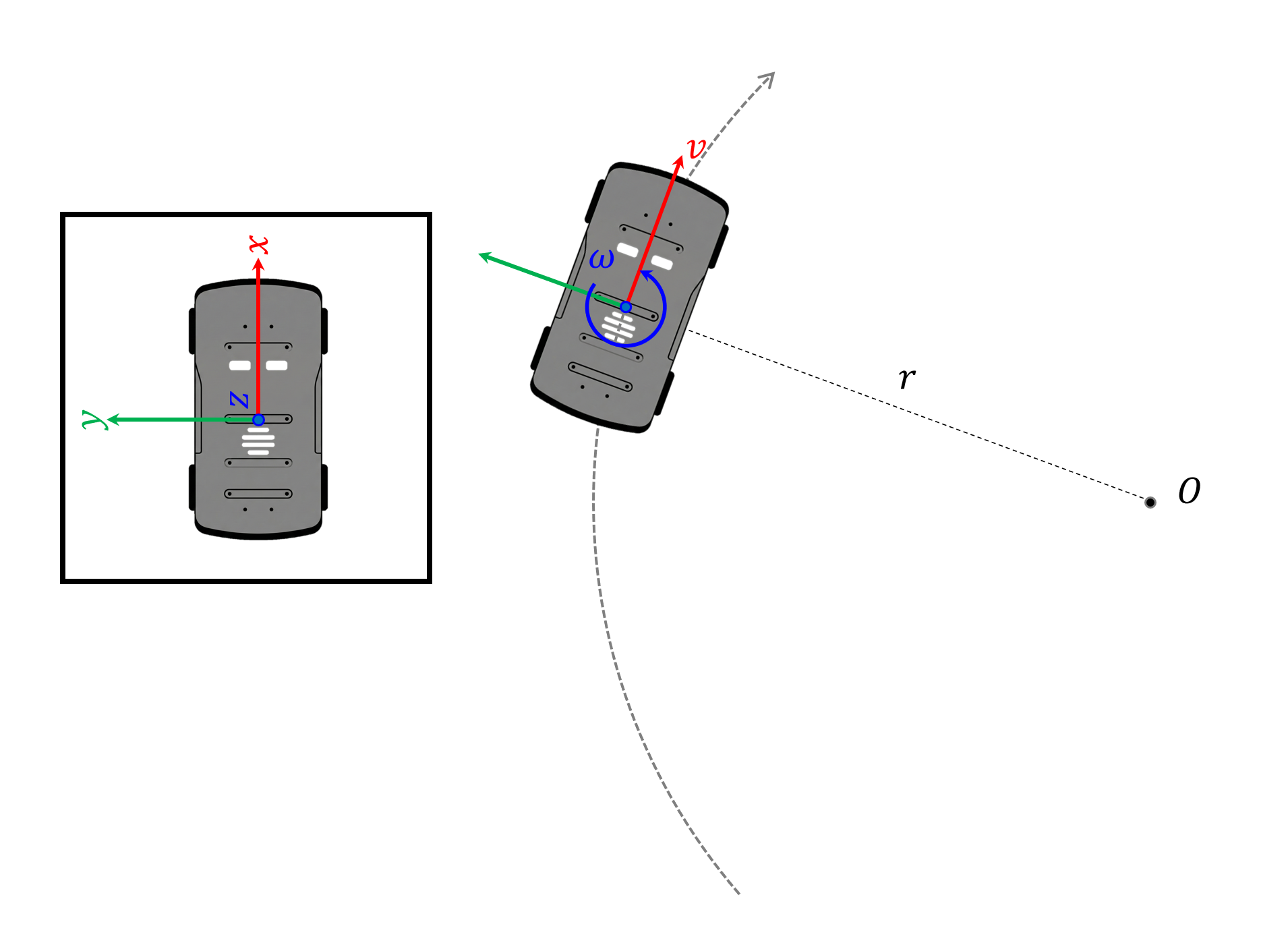
차량의 움직임은 선속도(\(v\))와 각속도(\(\omega\))의 관계를 통해 정의됩니다.
제어 변수 정의#
\(v\) (Linear Velocity): 차량 중심의 전진 속도 [\(\mathrm{m/s}\)]
\(\omega\) (Yaw Rate): 차량의 회전 각속도 [\(\mathrm{rad/s}\)]
\(\kappa\) (Curvature): 회전 반경의 역수, 주행 경로의 굽은 정도 [\(\mathrm{m}^{-1}\)]
\(r\) (Radius): 회전 반경 [\(\mathrm{m}\)]
선속도, 각속도 관계#
UART 통신 레벨에서는 효율성을 위해 곡률(\(\kappa\)) 을 사용합니다.
여기서 차량의 곡률(\(\kappa\))은 다음과 같이 정의됩니다.
곡률 및 회전반경#
UART에서는 곡률 \(\kappa\)를 사용하므로 직진은 \(\kappa=0\)으로 표현됩니다.
방향
속도 (\(v\)): \(v > 0\) (전진), \(v < 0\) (후진)
각속도 (\(\omega\)): \(\omega > 0\) (CCW, 좌회전), \(\omega < 0\) (CW, 우회전)
곡률 (\(\kappa\)): 전진(\(v>0\)) 기준, \(\kappa > 0\) (좌회전), \(\kappa < 0\) (우회전)
제어 인터페이스#
Low-Level Control Interface#
주행 알고리즘은 Jetson Orin NX에서 실행합니다. 모터/서보의 저수준 제어(PWM, 엔코더 등)는 전용 제어보드가 담당합니다.
통신 방식: Jetson - 제어 보드 간 USB Serial (UART 프로토콜)
API 입력 :
목표 속도 (\(v\)): 차량의 이동 속도
목표 각속도 (\(\omega\)): 차량의 회전 속도 설정
UART 통신 입력 :
목표 속도 (\(v\)): 차량의 이동 속도
목표 곡률 (\(\kappa\)): 차량의 회전 곡률 설정
Timeout (Deadman Switch): 차량은 마지막 명령을 반복합니다. 호스트 프로그램 종료 시 명시적으로 정지 명령 \((0, 0)\) 을 보내는 것을 권장합니다.
Limits & Safety
안전한 주행과 하드웨어 보호를 위해 다음 제한 사항을 준수하십시오.
속도 제한:
차량의 물리적 최대 속도는 \(5\,\mathrm{m/s}\)이나, 펌웨어 레벨에서 \(|v| \le 2.0\,\mathrm{m/s}\)로 제한 됩니다.
제한 속도 초과 명령 시, 펌웨어에서 \(2.0\,\mathrm{m/s}\)로 클램핑됩니다.
조향(곡률) 제한:
하드웨어 보호를 위해 곡률 \(|\kappa| \le 3.0\,\mathrm{m}^{-1}\) 이내 사용을 권장합니다.
물리적 조향각 한계는 \(\delta_{\max} \approx 45^\circ (0.785\,\mathrm{rad})\)이며, 서보 PWM 신호는 \(900 \sim 2100\,\mu\mathrm{s}\) 범위로 제한됩니다.
각속도 명령으로 환산 시: \(|\omega| \le |v| \cdot \kappa_{\max}\) 조건을 만족해야 합니다.